一、STMProject——XRD
1 停止
接收到停止命令后,通过地址表,减速停止,并不是急停。
疑问:
- 缓慢减速停止,还是急停
- 两种都需要?
- 急停是使能IO,还是停止PWM
- 使能IO是否需要接入,单片机控制
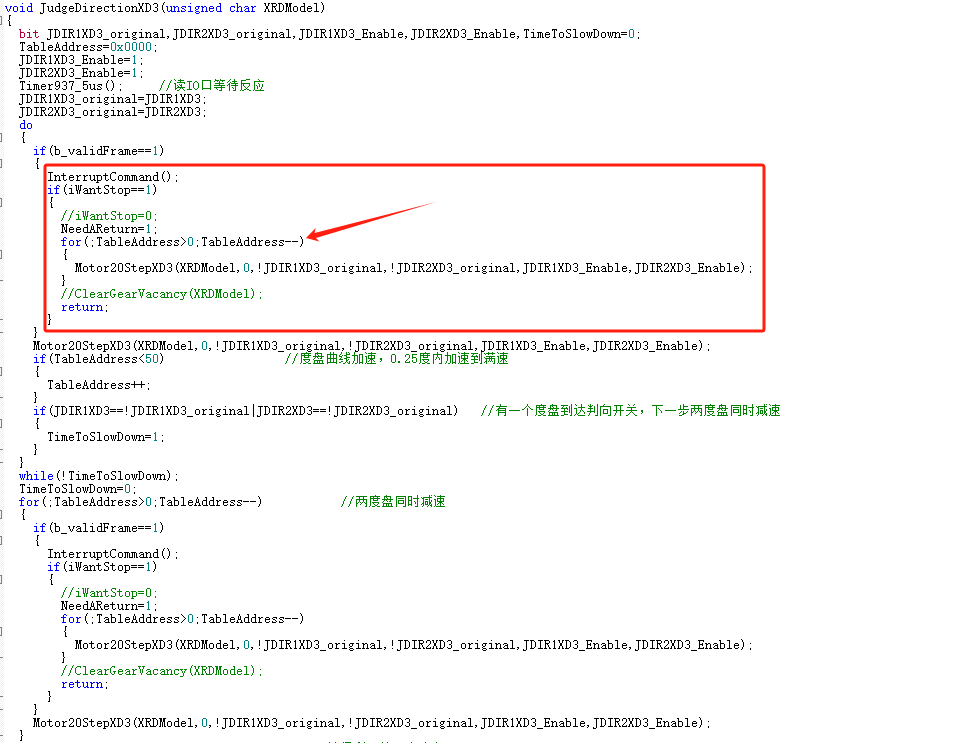
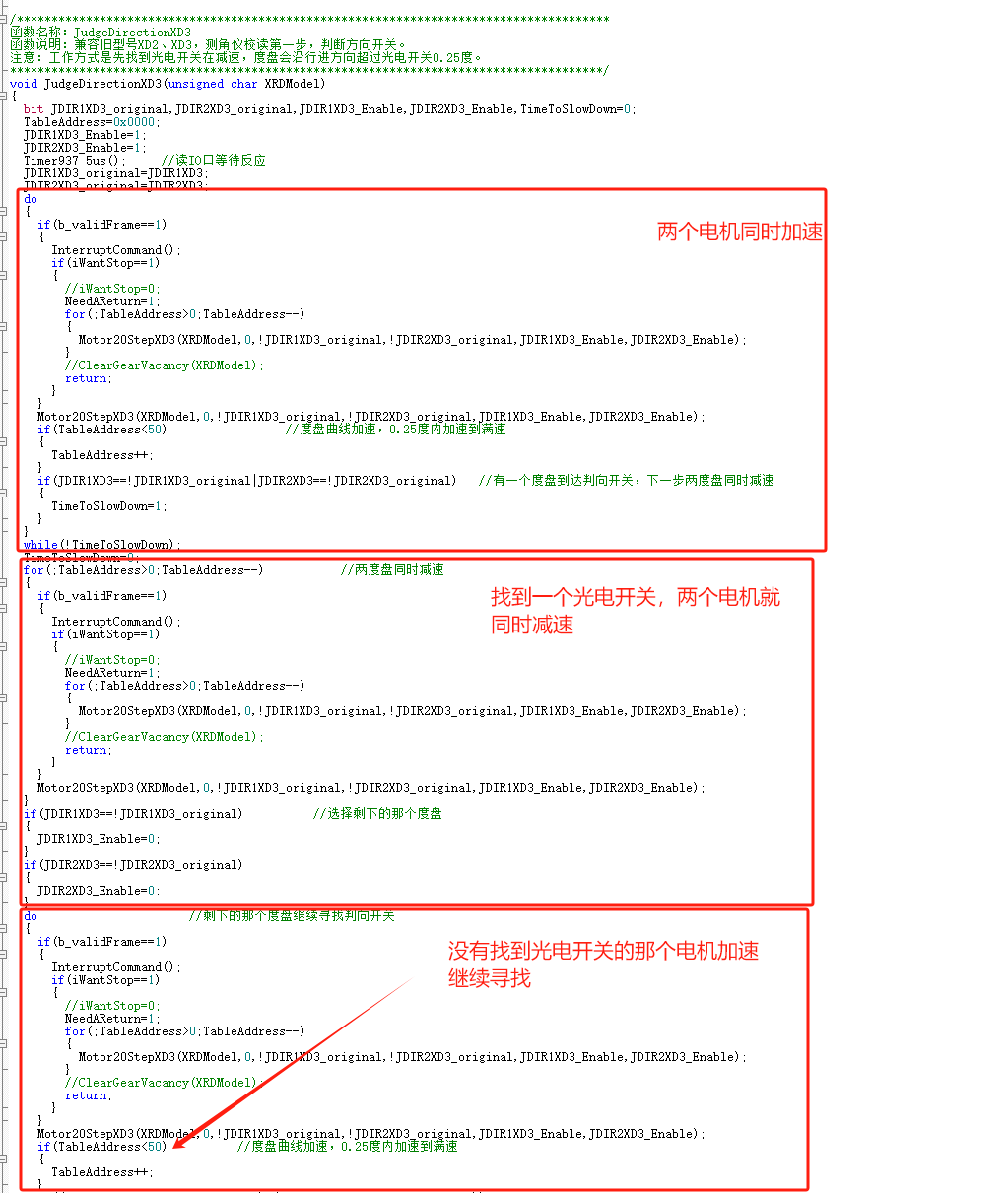
2 校读
疑问: 系统,一直去判断,是否接收到停止命令,响应比较慢。
方案: 通过立即处理命令和阻塞命令两个线程,可以实现不同命令同时响应。
- 如果第一次就是高角度,是否就不需要第二次判向.(高角度不遮挡,0度开始遮挡)
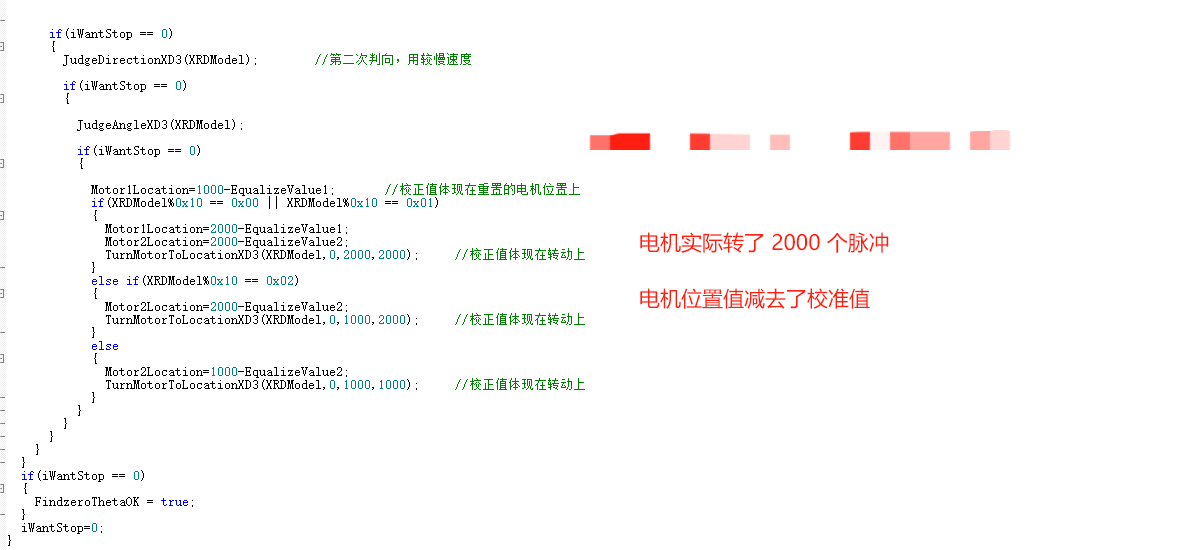
- 并不是重置为5度,跟5度差个校准值?,2000个脉冲,2000 * (0.005) = 10°,型号对应关系。

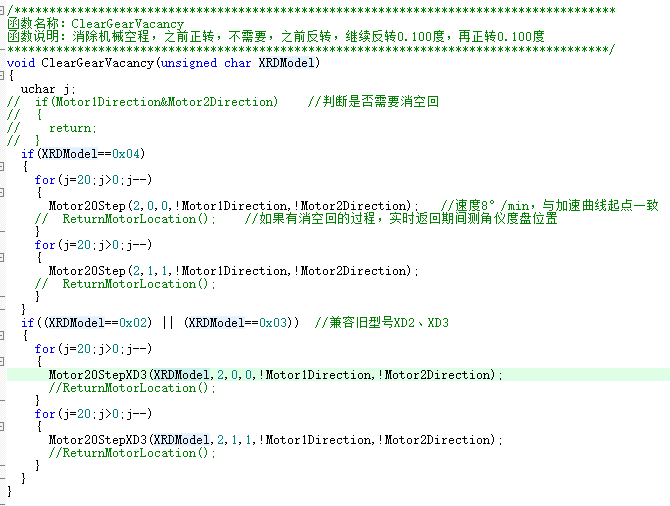
- 消除机械空程
- θ:2θ

- 不同机器型号
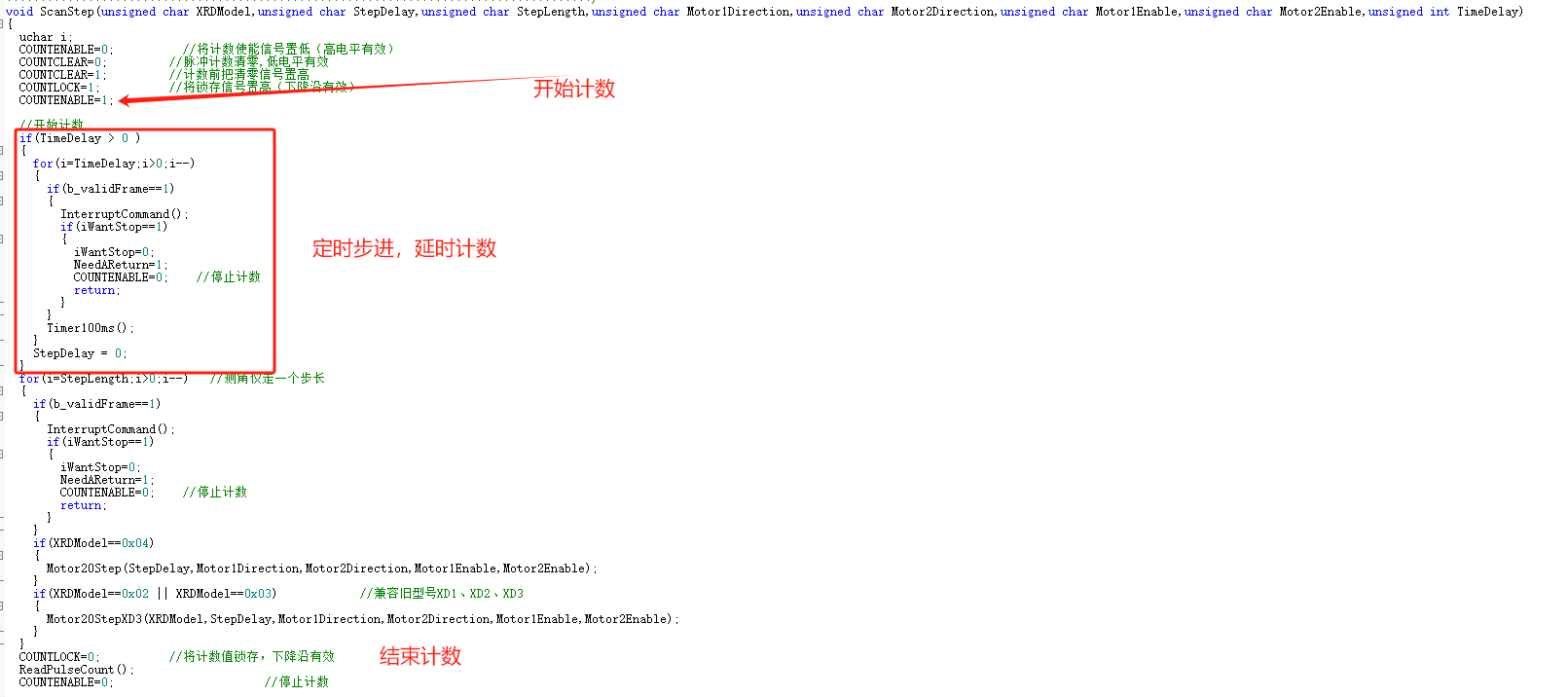
3 叠扫
定时步进:(延时阶段+电机移动阶段)都记时
最小都是20个脉冲,0.05度
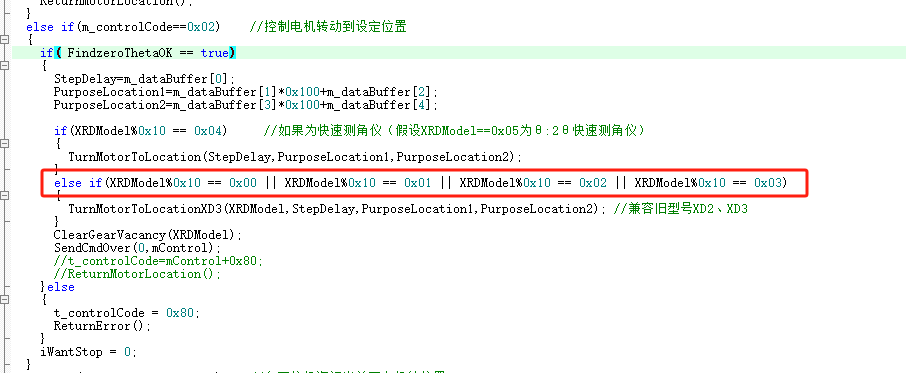
4 设置角度
原代码是按 0.05 : 1 定义
0.0001度,一个脉冲
直接按角度定义,能通用吗?
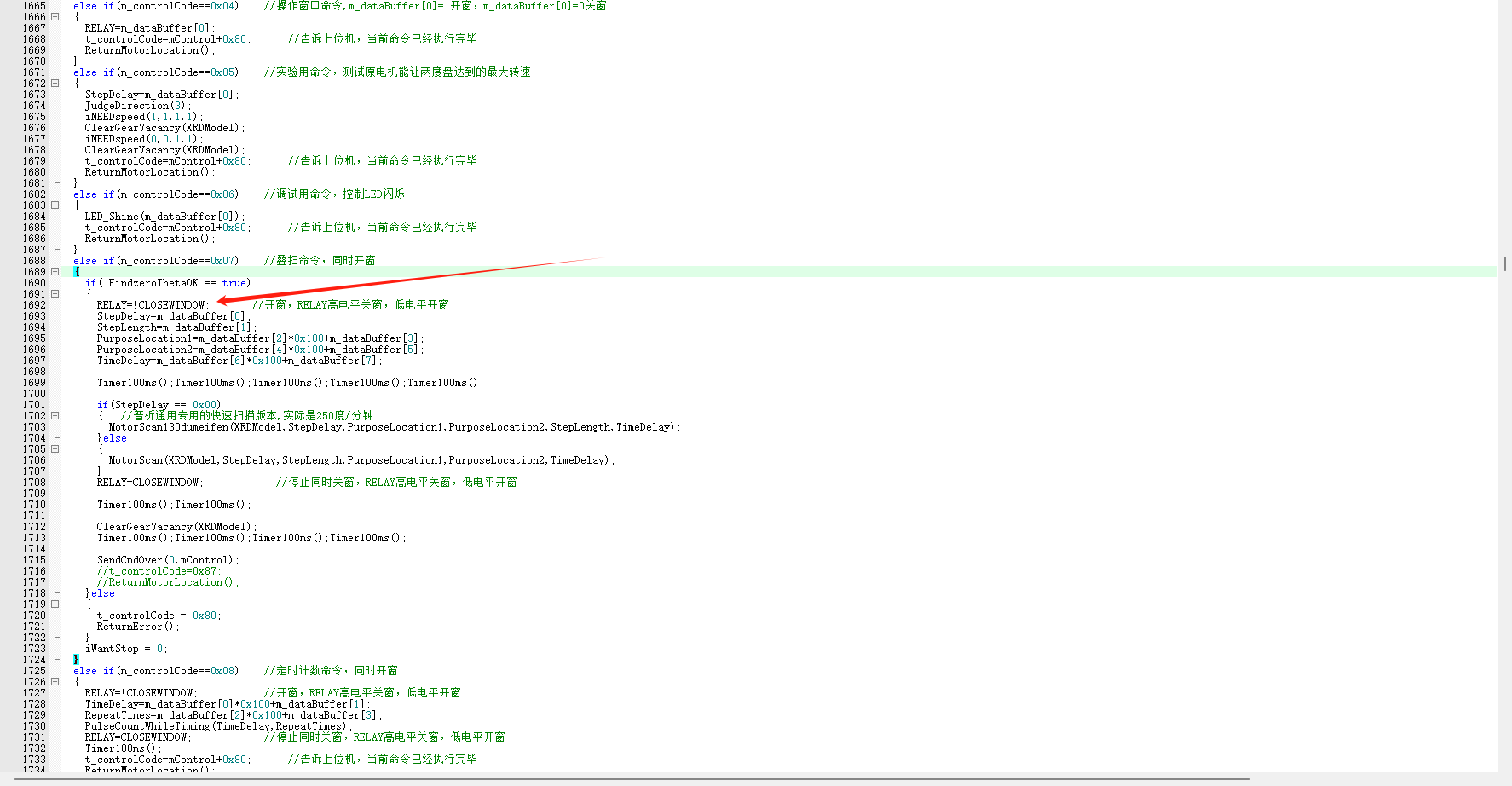
5 开窗
