一、无人机基本知识
1 X模式和十字模式
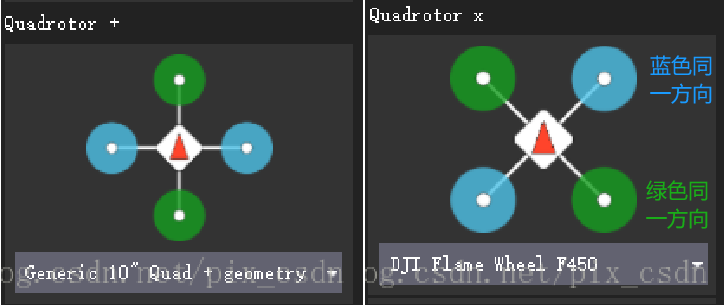
十字模式如下图左所示,X模式如下图右所示。对于姿态测量和控制来说,两种结构差别不大。如果考虑安装航拍摄 像机,为了视线不被挡住,通常采用X模式。
一般都是采用X模式,M1和M3(对角线电机)同一个旋转方向。不同飞控的旋转方向定义会有区别,但是对角线都是同一个旋转方向。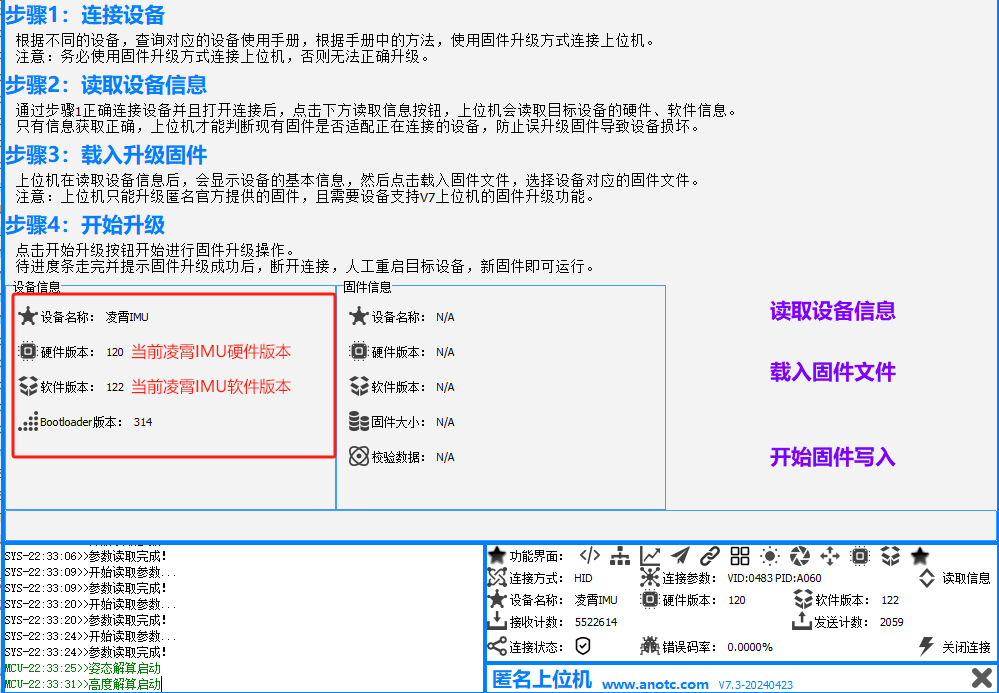
1.1 匿名飞控旋转方向定义
2 坐标系
姿态角(pitch、roll、yaw)是飞行器的机体坐标系与地面坐标系的夹角,也叫做欧拉角。
-
俯仰角(pitch):机体绕着Y轴旋转。向上(抬头)时,俯仰角为正,否则为负。
-
偏航角(yaw):机体绕Z轴旋转。机头右偏航(右转)为正,反之为负。
-
滚转角(roll):机体绕X轴旋转。机体向右滚为正,反之为负。
3 无人机运动
3.1 垂直运动
-
当 mg>F1+F2+F3+F4,此时做下降加速飞行
-
当 mg<F1+F2+F3+F4,此时做升高加速飞行
-
当 mg=F1+F2+F3+F4 此时垂直上保持匀速飞行
3.2 偏航飞行yaw
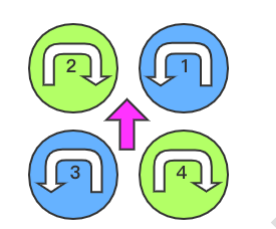
正前方为机头,此时以机头为参考做旋转运动。从上图可以看出ω 4 和ω 2 的转向,与ω 1 和ω 3 的转向相反,这是因为螺旋桨旋转会产生水平扭矩。于是当ω4+ω2≠ω 1+ ω 3 就会产生水平旋转,这就是偏航原理。至于是顺旋还是逆旋,那得根据实物电机正反转搭配 正反桨来决定了。
3.3 俯仰飞行pitch
-
当 F1+F4<F2+F3 向前飞行
-
当 F1+F4>F2+F3 向后飞行
3.4 横滚飞行roll
-
当 F4+F3>F1+F2 向右飞行
-
当 F4+F3<F1+F2 向左飞行
https://blog.csdn.net/2301_77206599/article/details/134906797
https://www.bilibili.com/video/BV1sC411J7F1/?vd_source=e6b01e2e688ed9241677df121e4b897a